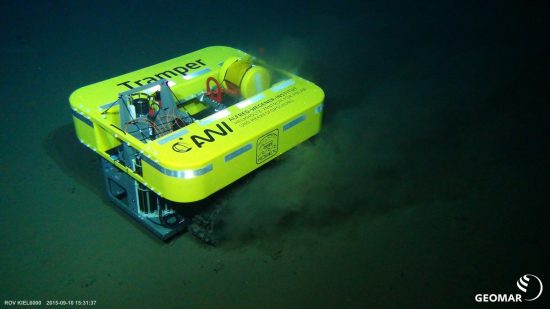

Autonomous deep-sea robot at work
Deep on the Arctic seabed, an autonomous deep-sea robot has been hard
at work, having recently started its one-year mission to measure oxygen
levels at the seabed on a weekly basis. Designed by a team of
scientists and engineers from the Alfred Wegener Institute, Helmholtz
Centre for Polar and Marine Research, the crawler has been christened
Tramper.
Its functions – sleeping, moving, taking photographs and measurements –
appear pretty easy. However, the team is a little more cautious, since
all these take place underwater at temperatures near freezing point.
Hence, Tramper kicked off its mission with a little test run, in which
it travelled 123 metres and completed seven measuring cycles over two
days at a 1,500-metre depth – this test Tramper had passed with flying
colours.
This paved the way for the crawler to be deployed on its maiden mission
on 11 July 2016. A video-guided launcher system conveyed the device
safely to the seabed at a depth of 2,500 metres. To perform its
mission, Tramper moves 15 metres to an undisturbed location, then an
image recognition will survey the area. If any stone or object is
recognised, it will move two metres away from its current spot before
taking another photograph. Then, the measurements at the site begin, in
which sensors are placed in the sediment at increments of 0.1
millimetres to measure the oxygen distribution in the seabed.
After taking the measurements, Tramper goes into a sleep mode for a
week to conserve energy. “Ultimately, it should perform more than 52
such measurements cycles – and at a temperature of minus 1.8 degrees
Celsius, which places a strong demand on the batteries,” said Dr Frank
Wenzhöfer, a scientist at the Helmholtz Max Planck Joint Research Group
for Deep-Sea Ecology and Technology.
At the end of the project, the scientists will use the measurements to
investigate the activity of microorganisms at the seabed.
Microorganisms like bacteria are mainly responsible for the degradation
of organic matter in the seabed, while consuming the oxygen within it.
The amount of dead algae at the seabed determines the level of
bacterial activity and hence the oxygen consumption.
The scientists will use the measurements provided by Tramper to
identify the natural variation over the course of the year. “Statements
can also be made about how the ecosystem of the Arctic seabed responds
to environmental changes. Such data about the Arctic are still
incomplete,” said Dr Wenzhöfer.
The research team is already looking forward to their next expedition
in 2017, in which they will return to the Arctic on board the RV
Polarstern and retrieve the Tramper – hopefully “safe and sound, and
full of valuable data!”
More information: www.awi.de
See also: taucher.net/diveinside-enhancing_the_analysis_of_climatic_changes
Video: youtu.be/h9Jh1oEBhAI
 Mares
Mares 28th July 2016
28th July 2016