



Scientists head northwards with new autonomous instruments
On 13 June 2016, a team of scientists set off to Spitsbergen on a
mission to use some newly developed equipment in the Arctic Ocean,
geared towards analysing the climatic changes in the Arctic and their
impact on the fauna in the future with greater temporal and spatial
resolution.
The scientists, from the Alfred Wegener Institute, the Helmholtz Centre
for Polar and Marine Research (AWI), are travelling on board the German
research vessel Polarstern.
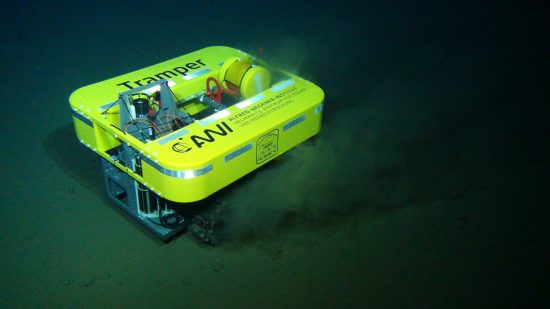
The new equipment, comprising autonomous instruments on the seabed, in
the water column and in the air, will complement the long-term
measurements of the deep-sea research group. For the first time, an
Autonomous Underwater Vehicle (AUV) called Tramper will be deployed on
the Arctic seabed for a year.
"The newly developed device is to measure oxygen along the depth
gradients on a weekly basis. In this way, we want to quantify how the
sediment-dwelling marine organisms remineralise the biomass on the sea
floor," said Dr Thomas Soltwedel, deep-sea ecologist at AWI and the
expedition's chief scientist.
With this mission, the scientists want to find out two main things: how
climate-induced changes in the productivity of algae on the water
surface, in and under the sea ice are temporally coupled to the export
of nutrients in the deep sea, and how deep-sea organisms react to the
presumably strong variability in food availability.
Another AUV, called PAUL, will float on a pre-programmed course through
the water column, collecting water samples and detecting a range of
environmental factors. PAUL has been equipped ala a small laboratory,
and will measure water temperature, salinity, concentrations of
nitrate, chlorophyll and oxygen, as well as a range of organic
substances and the intensity of photosynthetically active radiation.
PAUL can also measure the physical properties along the melt-water
border on the edge of the ice of the Arctic Ocean using a built-in
acoustic Doppler current profiler (ADCP).
Autonomous flying devices called Unmanned Aerial Vehicles (UAVs) will
be used to understand the ice conditions above PAUL. They will measure
the thickness of the snow cover and the ice coverage. The scientists
can measure the extent to which sunlight (as energy) reaches the ocean
under the ice. One of the UAVs will place GPS transmitters on the sea
ice to record the ice drift. The data will be used to programme the
AUVs' route.
Further Information: www.awi.de
 Mares
Mares 16th June 2016
16th June 2016