Helmholtz Alliance ROBEX tested innovative technologies on expedition
On Tuesday, August 22nd, the research vessel Polarstern will set off on a special expedition, traveling from Tromsø, Norway to the Arctic. Its mission: to retrieve the autonomous underwater robot TRAMPER, which is scheduled to resurface after spending a year on the Arctic deep sea floor.
TRAMPER and other robotic systems developed jointly by deepsea and space scientists within the framework of the Helmholtz Alliance ROBEX (ROBEX stands for Robotic Exploration of Extreme Environments) are now being tested under real conditions for almost three weeks. ROBEX aims to develop new technologies for the exploration of hard-to-reach areas with extreme environmental conditions.
"The TRAMPER will surface” said Dr Frank Wenzhöfer from the Alfred Wegener Institute, Helmholtz Center for Polar and Marine Research (AWI). Working with AWI engineers, the biogeochemist developed and deployed the deep sea crawler on a Polarstern expedition on 11 July 2016 in the Arctic Ocean, as we reported here.
On this expedition, in the event the scientists cannot control the TRAMPER‘s instruments directly from the surface, the ROV Kiel 6000 on board the Polarstern can be used to trigger the ballast discharge of the TRAMPER remotely, and this will cause the TRAMPER to ascend to the surface.
As the scientific director of the expedition, Dr Wenzhöfer's thoughts centre around the “data treasure” he hopes to find: "I am very curious as to whether TRAMPER has carried out all its pre-programmed measurements as planned.“
"In the ROBEX Alliance, of course, we have included in the calculation of the current requirement that the underwater robot is subjected to extreme temperatures of about minus 0.8°C at around 2,500 meters depth for a year without any contact. However, since nobody has attempted such an operation before in the Arctic deep sea, there is a risk that something has not worked as planned,“ said Dr Wenzhöfer.
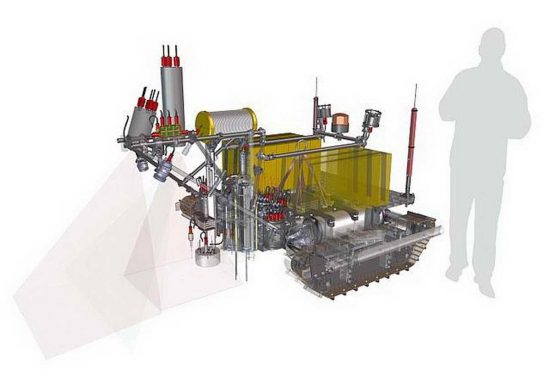
The objective of TRAMPER is the continuous measurement of the oxygen consumption at the seabed. For the past year, every Monday, it would travel 15 meters across the sea floor to reach an undisturbed area. An image recognition camera then would check the surface: If it detected stones or other projects, TRAMPER would move one meter farther. A high-resolution photograph would be taken before the actual measurement. In the measurement process, sensors would be moved in small increments of 0.1 millimetres into the sediment, measuring the oxygen distribution in the upper ten centimetres of the seabed. After this, the device would go into standby mode for one week, so that there would be sufficient energy to last the 52-week measuring cycle.
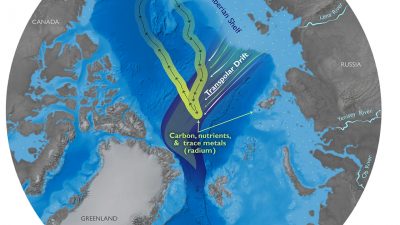
The question that TRAMPER is being used to answer is how the carbon cycle in the sea works, how organisms on the seabed feed and what changes has arisen as a result of climate change. The expedition scientists have planned to analyze the data and then equip the TRAMPER with new sensors and batteries to use it for another year in the AWI-Hausgarten observatory in the Arctic deep sea.
"The expedition will also be particularly exciting for the ROBEX space explorers, who are working on a ship for the first time," said ROBEX coordinator Martina Wilde. Together with deep-sea researchers, they are testing further innovative technologies.
For the current expedition, two “big brothers” of "TRAMPER" will be deployed for the first time in the Arctic deep sea: the NOMAD developed by the AWI, and the autonomous crawler VIATOR under the leadership of GEOMAR together with Airbus and the German Center for Artificial Intelligence (DFKI). For its mission, VIATOR will start from its MANSIO base station and independently travel back to its "garage" (base station) with the help of space flight navigation software and markers.
The MARUM Center for Marine Environmental Sciences at the University of Bremen, Airbus and the University of Würzburg have jointly developed a glider whose special features include the constructive design of an underwater “flying-wing” and its control, which allows a spatially high-resolution investigation of the upper layer of the ocean. Further developed unmanned aircraft of AWI and the University of Würzburg will support the autonomous underwater vehicle PAUL (from AWI) in the navigation in hard-to-reach, ice-covered regions. In addition, the "Lab on a Chip" is being tested; it is a highly integrated, miniaturized analyzer for chemical measurements, which can be installed in different underwater technologies as well as in future space systems.
 Herbert
Herbert 22nd August 2017
22nd August 2017