Almost 60 weeks of measurements of oxygen content at the bottom of the deep sea obtained
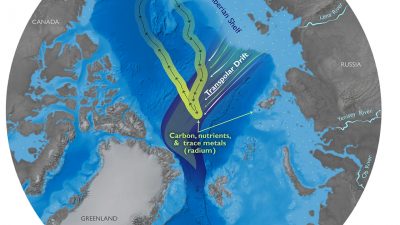
On 27 August 2017, deep sea explorers of the Alfred Wegener Institute, Helmholtz Center for Polar and Marine Research (AWI) retrieved the underwater robot TRAMPER from a depth of 2,435 metres after it spent almost 60 weeks underwater in the Arctic sea floor. It was the first long-term use of a mobile deep-sea robot under the Arctic sea ice.
It was an exciting weekend on board the Polarstern research ship: the deep sea and space explorers of the Helmholtz Alliance ROBEX had travelled directly from Tromsø, Norway to the Fram Strait as we had reported. On Friday, August 25th, they launched the underwater vehicle ROV Kiel 6000 (from the GEOMAR Helmholtz Center for Ocean Research Kiel) at exactly the place where they had launched TRAMPER on 11th July 2016.
“The ROV Kiel 6000 found the exact place where we left Tramper a year ago,” reported “ROV driver” Dr Frank Wenzhöfer. In the control station, a direct feed of the ROV cameras was established, allowing the expedition team to follow the ROV as it tracked down Tramper. "When we saw him on the monitor, we were a bit surprised to see “Tramper” not facing in the correct direction of travel. The reason: A chain drive had failed, so Tramper was only turning itself round and round in the second half of its time in the deep sea.”
As soon as wind and waves at the surface permitted it, Tramper was brought to the surface. The researchers sent it an acoustic signal, and it discharged its ballast tanks. It took two hours to ascend from a depth of 2,435 meters. Then, from within a dinghy, the expedition members helped to pull it on board of the Polarstern.
The initial analysis of Tramper’s data showed that the measuring systems (camera and sensors) worked perfectly. "All programmed cycles [sleeping - driving - sediment check - photo - measure - photo] worked. Unfortunately, after the first half of the mission, it was always in the same place,” said Frank Wenzhöfer. Due to a malfunctioning chain drive, Tramper had spent the second half of the mission digging into the seabed. In the first half of its mission, it travelled about 360 metres. “The first 24 weeks showed exciting data, which we will now evaluate further. This will tell us something about the variation of oxygen consumption in the Arctic seabed over half a year [July to December],” said Dr Wenzhöfer.
However, it is a pity that measurements of the variation of oxygen consumption from January to August are unavailable. Although the sensors continued to take measurements, it was always in the same place. Expedition members will now try to repair the malfunctioning chain drive. If successful, they will replace the batteries and reset the sensors so that Tramper would be able to continue to collect fresh data for another year.
More information: www.awi.de
 Herbert
Herbert 31st August 2017
31st August 2017